1 Introduction
The traffic accident automatic processing equipment based on SOPC technology can be placed in each motor vehicle to achieve the purpose of automatically processing traffic accidents. The cost is low, and the practicality and scalability are strong. The design goal of this device: When a motor vehicle encounters a car accident, the owner can first use the device to locate through the equipped GPS, get in touch with the traffic control department through the GSM on the device, and record the accident scene and license plate number through the camera on the device. For related information, the device can also carry radio communication equipment based on SOPC to achieve voice communication with relevant departments.
2 Hardware composition
The design adopts the SOPC development tool of Altera. The development of the system includes two parts: hardware and software. The SOPC Builder is used to generate NIOS and NIOSâ…¡ embedded processors. The NIOS, NIOS II embedded processor development tool allows users to configure one or more NIOS, NIOS II CPUs, add peripheral devices from the standard library, comprehensively process custom systems, and compile the system with Quartus II design software. The hardware block diagram is shown in Figure 1.
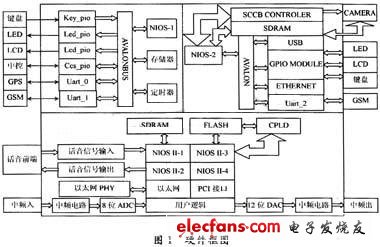
2.1 GPS and GSM
The connection of NIOS-1 to external devices such as keyboard, LED and LCD display, car central control system and GPS system is relatively simple, and the connection of GSM system is more complicated, which will be explained in the software part. The work flow of this part is: the information from the car's central control system and GPS system can be displayed on the LED and LCD display, or it can be sent wirelessly through the GSM system. Users can control the system through the keyboard, and the traffic control department can also remotely control the car's central control system through the GSM system.
2.2 Camera part
The SCCB controller is used to control the camera. The camera model used in the system is Omni Vision's OV7649CAMERACHIPS chip and its supporting CMOS lens. This is a low-voltage CMOS image sensor chip. Through its unique SCCB (Serial Camera ControlBus) bus control, it can achieve various forms of image output such as full frame, half frame, sub-sampling, etc. The output format can be selected to be made YUV, RGB or original RGB, etc. In addition, automatic exposure control, image gain control, etc., and all configurations are changed through the SCCB bus. The state machine model can be simplified into 6 states: Idle idle; Bit_Start bit start; Bit_Mid_LOW bit transmission mid-low bit transmission; Bit_Mid_HIGH bit transmission mid-high bit transmission; Bit_End bit transmission end; Trans_End entire transmission end. According to the specific jump flow, the conditional statement in VHDL language can be easily completed, and will not be repeated here.
TYPE states IS (Idle, Bit_Start, Bit_Mid_LOW, Bit_Mid_HIGH, Bit_End, Trans_End); SIGNAL now-State: states; The following describes the process of filling frame data:
In the simulation process, due to the analysis of the signal for a long time, it is limited to space and the simulation results cannot be listed here. In the actual use of the project, the SCCB bus control module has been verified to be correct, it can correctly implement the configuration of the camera, and the quality of the pictures taken has reached the expected level.
2.3 Radio communication
This part is the most complicated part and takes up the most resources in the whole system. Focus on this. This part also uses SOPC technology to realize the radio communication function which can reduce the cost compared with the traditional radio system. And integrated the entire system so that it is based on FPGA development board. The function of this part is as follows: transplant the voice codec program to two NIOSâ…¡ (NIOSâ…¡-1, NIOSâ…¡-2) soft core processors; use PCIIP core to add 32 B PCI Slave bus interface in FPGA. The NIOSâ…¡-3 processor is used to realize the dynamic configuration function of the system parameters, and the control management function of the general controller in the original system is realized; the NIOSâ…¡-4 soft core processor is used to complete the convolutional code encoding and Viterbi decoding; The Ethernet IP core is added, and the external Ethernet PHY interface chip is used to expand the Ethernet interface for the radio, and the SDRAM controller is added. The SDRAM memory is expanded outside the system to further enhance the data processing capability of the radio. In the user logic, a matched filter of variable length is designed to complete the despreading of the spread spectrum signal and the demodulation of the data.
In this part of the system, NIOSⅡ-1 processor is used to achieve real-time 24 k. 32 k rate ∑- △ speech encoder, NIOSⅡ-2 processor is used to realize ∑- △ speech real-time decoder, these two processors use NIOSⅡPF high-speed 32-bit kernel; NIOSⅡ-3 processor uses standard kernel, use To complete the configuration of system parameters, human-computer interaction interface, radio management and control, and the online update of FLASH configuration content in the system; the added 10/100 M Ethernet interface of the system supports the remote configuration and management of the device through the network, including the use of pseudo The issuing of codes, the issuing of radio station use keys, the remote updating of system parameters, the reconfiguration of new functions, etc., provide the possibility of realizing the air management of all working radio stations in a certain area. By adding NIOSⅡ-4 processor in FPGA, it is used to realize channel coding and decoding, improve the bit error rate performance of the system, and conveniently introduce the data transmission function for the radio station at a small cost. We are using (2,1,7) convolutional codes with Viterbi decoding for simulation. A NIOSⅡPF grade processor is used with a small amount of user logic to complete the convolutional coding and Viter with a rate of not less than 10 kb / s. Than decoding work.
Its ruggedized structure and Fashion is Slim and Light performance ensure the monitor can work stable at harsh environmental conditions. Monitor`s front bezel is made of White/Black powder coated aluminum. We provide vandal-proof protective glass or touch-screen for covering the front screen. Also we have various boards for different signal input solutions, and 12V/24V DC power input for different application requirements.
Smart Medical Touch Monitor
Shenzhen Hengstar Technology Co., Ltd. , https://www.angeltondal.com