1) Motor's overloaded motor An important operating parameter, rated operating current, operates within a fixed current and is a safe working area. Changes in the mechanical load or supply voltage will cause changes in the operating current. When an abnormal situation occurs, the motor is overloaded, the speed is decreased, the current in the motor winding is increased, the rated operating current is exceeded, and the winding temperature is increased. Overload operation will lead to aging of the motor winding insulation, shorten the service life of the motor, severely cause the winding insulation breakdown to cause short circuit, and the winding fires and burns. The overload operation of the motor means that the increase of the slip rate is caused by the abnormal temperature rise of the winding caused by the overcurrent, so it is also called overcurrent operation.
The relationship between the overcurrent of the motor and the overcurrent time is called the overload characteristic. In actual operation, short-time overload of the motor and a low degree of overload are difficult to avoid and allowable. The overcurrent and overcurrent allowable time are inversely proportional. This is called inverse time protection. See the figure below.
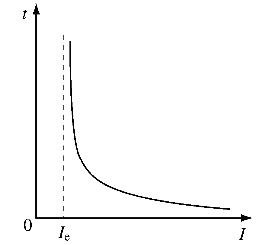
Figure 1 Motor overload protection reverse limit protection characteristic curve The overload protection operation threshold value is set at about 0.95~1.05 of the rated current of the motor, that is, when the running current is less than 1.1 times of the rated current, the motor can not be protected for long-term operation. When the overload level continues to increase, the protection action time should be shortened with the degree of overcurrent. It is generally believed that the starting current of the motor is 4 to 7 times of the rated current. The protection action should not only avoid the normal starting current, but also implement effective shutdown protection when overloaded. For example, at 4 times the rated current, the delay action is 10s to generate the protection action. At 7 times the rated current, the protection action should be generated after a delay of 2s. For short-term overload during operation, there is a certain time delay processing, no mis-protection action, and an effective response to long-term overload.
2) Short-circuit short-circuit protection of the motor is a limiting case of overload protection. Short-circuit faults of three-phase AC motors, single-phase short-circuit faults, phase-to-phase short-circuit faults, etc. When the cable is short-circuited, it directly causes a short-circuit to the three-phase power supply. The internal short circuit of the motor is mostly caused by the insulation damage of the motor, which is represented by the short circuit between the turns of the coil, the short circuit between the layers, the short circuit between phases and the short circuit to the ground (motor casing and rotor). Single short-circuit, generally does not burn the motor, according to the different grounding resistance of the shell, the formation of different ground current; (two-phase or three-phase) phase-to-phase short circuit, will form a large short-circuit current, usually the motor will be seriously burned .
Generally, it will be regarded as a short-circuit current by more than 8 times the rated current of the motor. For short-circuit protection of the motor, it is required to implement quick-break protection. The smaller the time constant, the better (the faster the action, the better).
In addition, when the motor is blocked due to mechanical reasons during operation, the stall current may reach 5 to 8 times of the rated current. When the rated current is more than 5 times during operation, it is regarded as the motor stalling fault. Implement the corresponding inverse time protection.
3) The phase-failure operation of the motor-phased phase-cut motor can be divided into the following cases:
a. The power supply is out of phase. If the phase is broken before the motor starts, it will cause difficulty in starting or starting, and the starting sound will be abnormal. When there is no protection, the motor will be easily burned due to blockage. In the running phase, the light load can run smoothly, but the running current is seriously unbalanced and may appear. Overcurrent operation. When overloaded, it is prone to blockage, serious overload and damage.
b. Motor winding open circuit failure. The power supply is normal, due to the motor winding open circuit failure, the phase is running, the operation is weak, the motor vibration is large, and the fault phenomenon is the same as a;
c. The motor cable is broken. The fault phenomenon is out of phase with the power supply.
The emergence of electronic motor protectors provides a possibility to fully implement the overload, short circuit and phase failure protection of the motor, which replaces the thermal relay to a certain extent, improving the control function and protection effect. The focus of this chapter is on the principle analysis and fault maintenance guidance of various electronic motor protector circuits. The electronic motor protector is hereinafter referred to as the motor protector.
3 Mm /8 Mm Nano Tip,Electronic Board Marker Pen,Touch Board Marker Pens,Infared Smart Board Marker
Shenzhen Ruidian Technology CO., Ltd , https://www.szwisonen.com