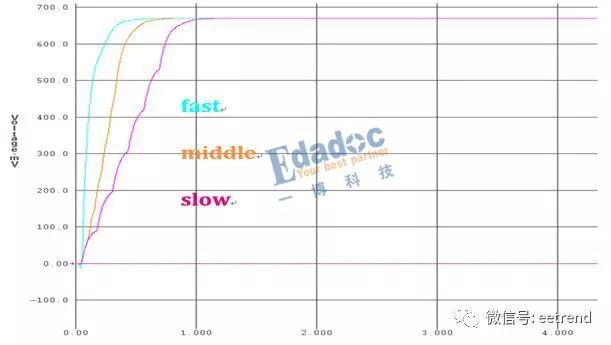
Whether it comes to hardware debugging or simulation, we often encounter chip driver configurations. For example, in a familiar DDR controller, there are usually multiple driver options available. These include different internal resistance values, such as 34 ohms, 40 ohms, and so on, or settings like fast, mid, or slow drive modes. The former primarily affects the amplitude of the output signal—lower internal resistance leads to higher output voltage levels. The latter relates to the slope of the signal transition: a fast drive results in a steeper rising or falling edge, while a slow drive produces a more gradual transition. In general, "driving" refers to one or both of these aspects.
For instance, when a DDR controller is connected to a 50-ohm load, the output waveform can vary depending on the driver configuration. The difference between drivers with fast slopes but varying internal resistances is evident, especially in terms of signal level differences.

If two drivers have the same 40-ohm internal resistance but different slope settings, the output waveforms will show the same amplitude but different edge slopes.
From an engineering perspective, many might think that stronger driving—higher amplitude and steeper edges—is always better. However, this isn't necessarily true. A smaller internal resistance doesn't always mean better performance, and a steeper edge isn't always ideal. This depends on the signal topology and how reflections behave in the system.

To better understand this, let’s fix the driver to 40 ohms and observe the effect of the rising edge slope on the signal quality. The eye diagram for the first case looks like this:
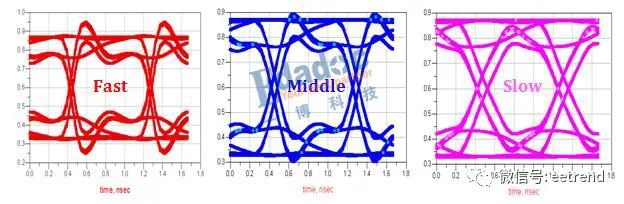
From the eye diagrams, it's clear that faster transitions may lead to a slightly larger eye opening, but they also reduce the eye width. The middle setting tends to provide the best balance.
Now, if we fix the slope to fast and test different internal resistances, the eye diagram appears as follows:
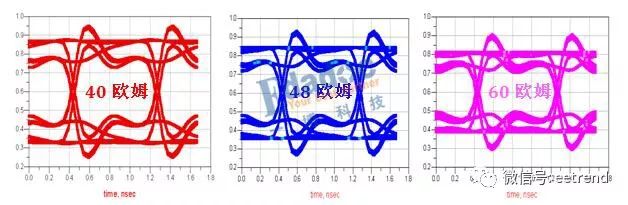
As seen, when the slope is fixed, varying the internal resistance only affects the signal amplitude, with little impact on the overshoot or undershoot.
In the case of address signals, which are prone to multiple reflections due to their transmission line behavior, a steeper edge can actually worsen signal integrity. This is because the high-frequency components in the signal are more sensitive to reflections, leading to more oscillations in the time domain.
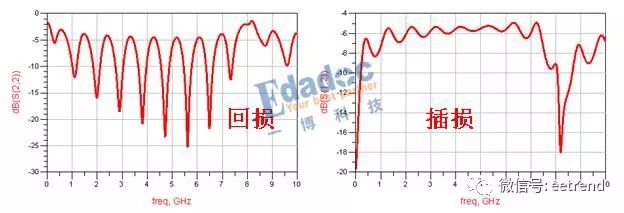
Therefore, using a slightly slower driver can help reduce the high-frequency energy in the signal, which in turn helps suppress some of the reflection peaks and minimize oscillations. However, going too slow can negatively affect the timing window, making it harder to meet setup and hold requirements. It's all about finding the right balance based on the specific design and signal integrity needs.
Hdg And Painted Radiator,Weather Proof Hdg And Painted Radiator,Weather Proof Hdg Radiator With Coating,Leak Free Hdg And Painted Radiator
Shenyang Tiantong Electricity Co., Ltd. , https://www.ttradiator.com